
About
👋🏻 Hi! I’m a Presidential Young Professor at the National University of Singapore (NUS), School of Computing, where I direct the MAGIC Lab. I completed my PhD in Computer Science at the University of Washington, co-advised by Prof. Ranjay Krishna and Prof. Dieter Fox (2022–2026). I am also a Graduate Student Researcher at the Allen Institute for AI (AI2), working with the PRIOR and Robotics teams. I have also interned at NVIDIA as a Research Scientist Intern.
My research mission is simple: I teach robots to perceive, reason, and act. I focus on robot learning, embodied AI, and building large-scale robotics foundation models that are deployable in the real world.
Previously, I obtained my B.Eng. in Electrical and Electronic Engineering with Highest Distinction from Nanyang Technological University (NTU), Singapore.
I am recruiting PhDs, RAs, Postdocs, and Visiting Students to join the MAGIC Lab at NUS! Sign up here.
🔥 News
- [2026/07] I am teaching CS6283 (Robot Learning in the Era of Foundation Models) at NUS.
- [2026/07] Invited to serve as Associate Editor for RA-L.
- [2026/06] Our paper FailSafe: Reasoning and Recovery from Failures in Vision-Language-Action Models has been accepted to IROS 2026.
- [2026/06] Honored to be a finalist for the Rising Star Award for Spatial Intelligence at the CVPR E2E3D Workshop.
- [2026/06] Invited to serve as Area Chair for CoRL 2026.
- [2026/06] Our paper VLS: Steering Pretrained Robot Policies via Vision–Language Models has received the Outstanding Paper Award at the Foundation Models Meet Embodied Agents @ CVPR 2026.
- [2026/06] Our paper VLS: Steering Pretrained Robot Policies via Vision–Language Models has received the Best Paper Runner-Up at the CVPR 2026 3D-LLM/VLA Workshop.
- [2026/06] Our paper MolmoB0T: Large-Scale Simulation Enables Zero-Shot Manipulation has received the Best Paper Award at the VLA Pipeline Workshop @ ICRA 2026.
- [2026/06] Our paper MolmoB0T: Large-Scale Simulation Enables Zero-Shot Manipulation has received the Best Paper Award at the Beyond Teleoperation Workshop @ ICRA 2026.
- [2026/06] Our paper MolmoB0T: Large-Scale Simulation Enables Zero-Shot Manipulation has received the Best Paper Award at the ICRA 2026 SDRL Workshop.
- [2026/05] We are launching MolmoAct2: Action Reasoning Models for Real-World Deployment.
- [2026/04] Our paper MolmoSpaces: Large-Scale Open Ecosystem for Robot Navigation and Manipulation has been accepted to RSS 2026 as Oral.
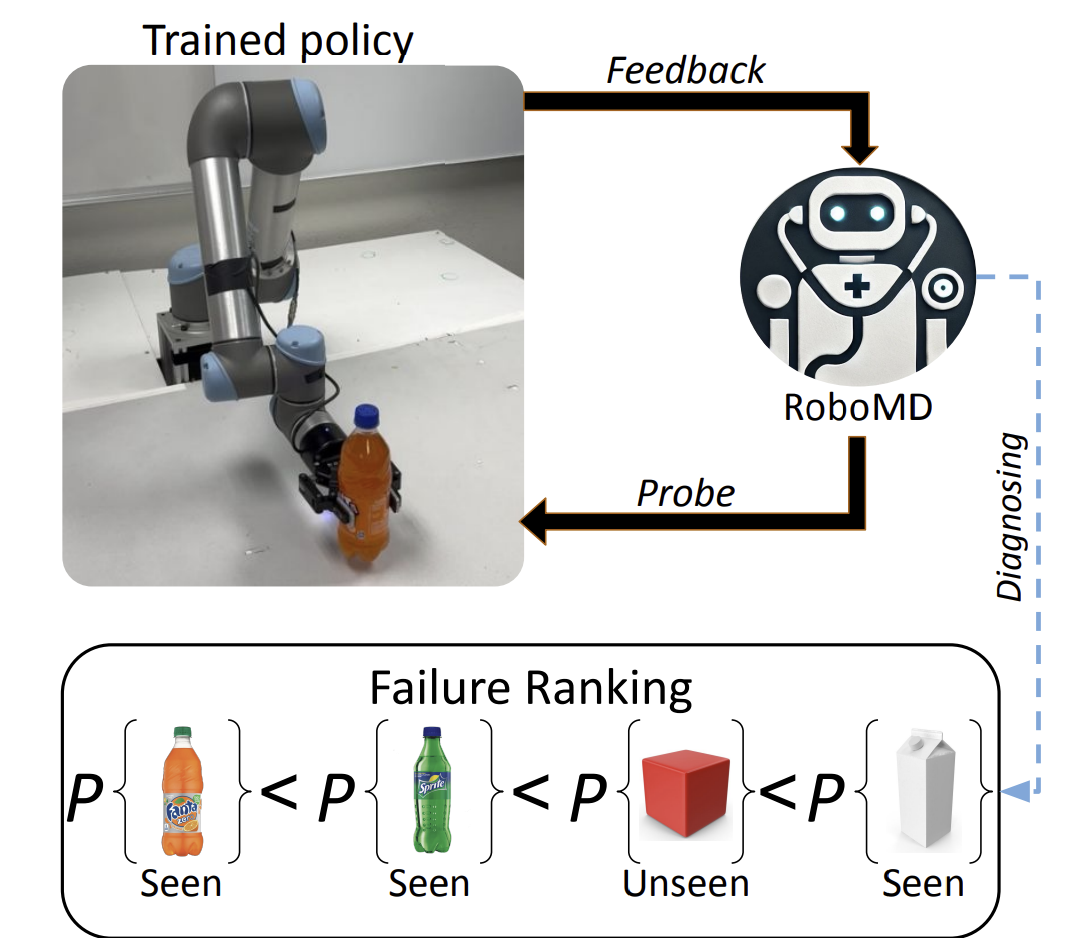
- [2026/02] Our paper From Mystery to Mastery: Failure Diagnosis and Recovery for Robotic Manipulation has been accepted to ICLR 2026.
- [2026/01] Our paper MolmoAct: Action Reasoning Models that Reason in Space has been accepted to ICRA 2026.
- [2025/12] Honored to join NUS as a Presidential Young Professor, directing the MAGIC Lab.
- [2025/10] Our paper FailSafe: Reasoning and Recovery from Failures in Vision-Language-Action Models has been preprinted to arXiv.
- [2025/09] Our paper SAM2Act has been selected as Best Paper Award at RemembeRL @ CoRL 2025.
- [2025/05] Our paper SAM2Act: Integrating Visual Foundation Model with A Memory Architecture for Robotic Manipulation has been accepted to ICML 2025.
- [2025/04] Our paper AHA: A Vision-Language-Model for Detecting and Reasoning Over Failures in Robotic Manipulation has been accepted to ICLR 2025.
- [2024/09] Our paper Manipulate-Anything: Automating Real-World Robots using Vision-Language Models has been accepted to CoRL 2024.
- [2024/07] Our papers THE COLOSSEUM and Octopi have been accepted to RSS 2024 as Oral.
- [2024/01] Our paper Selective Visual Representations Improve Convergence and Generalization for Embodied AI has been accepted to ICLR 2024 as Spotlight.
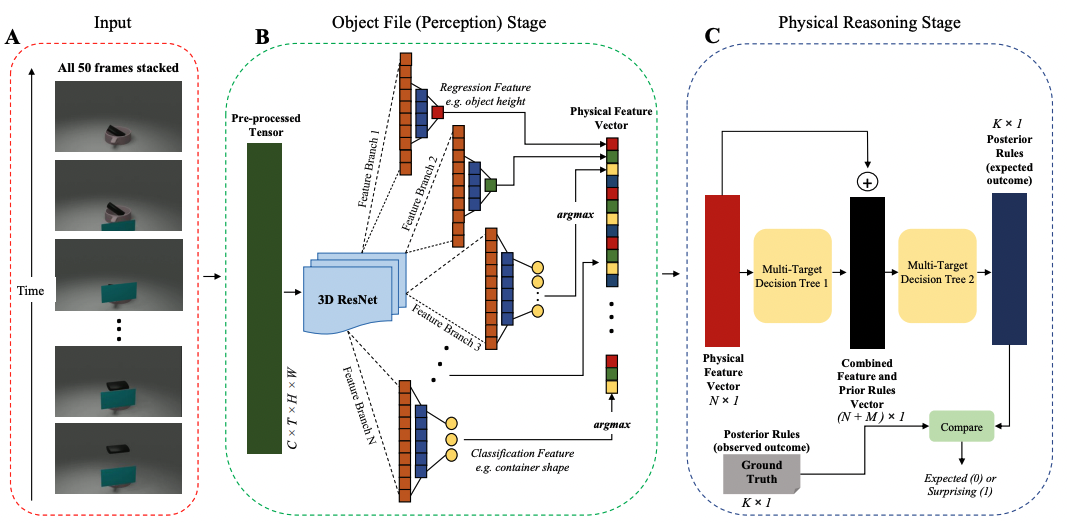
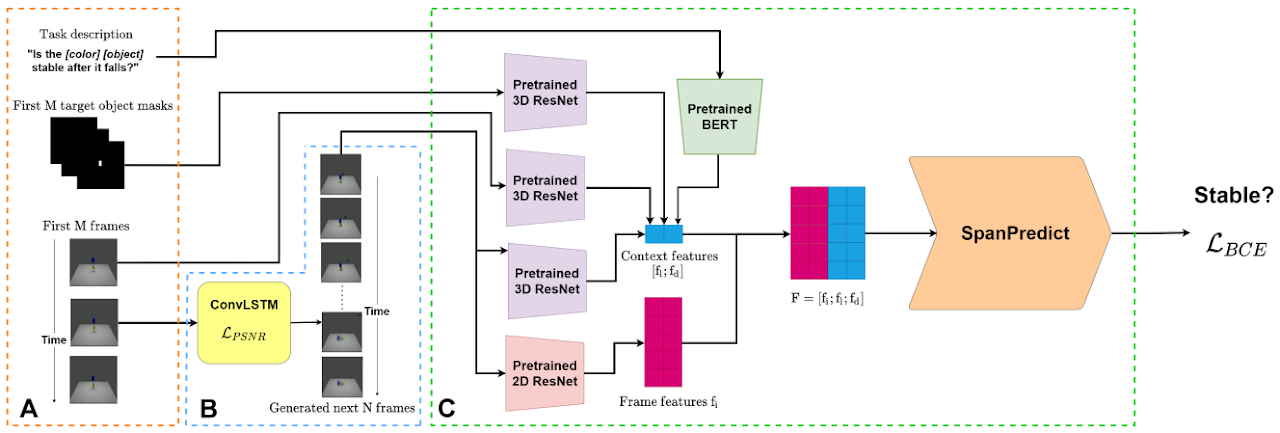
- [2023/10] Our paper NEWTON: Are Large Language Models Capable of Physical Reasoning? has been accepted to EMNLP 2023.
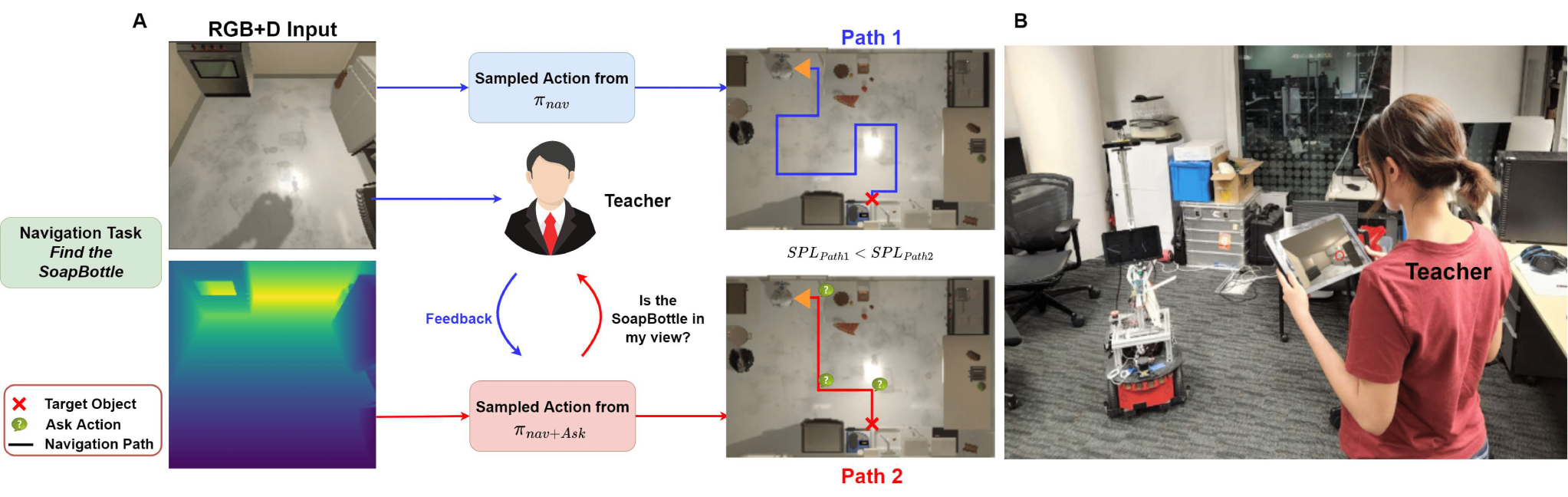
- [2023/07] AR2-D2 accepted to CoRL 2023. Good Time to Ask wins Best Paper Award at Ubiquitous Robots 2023.
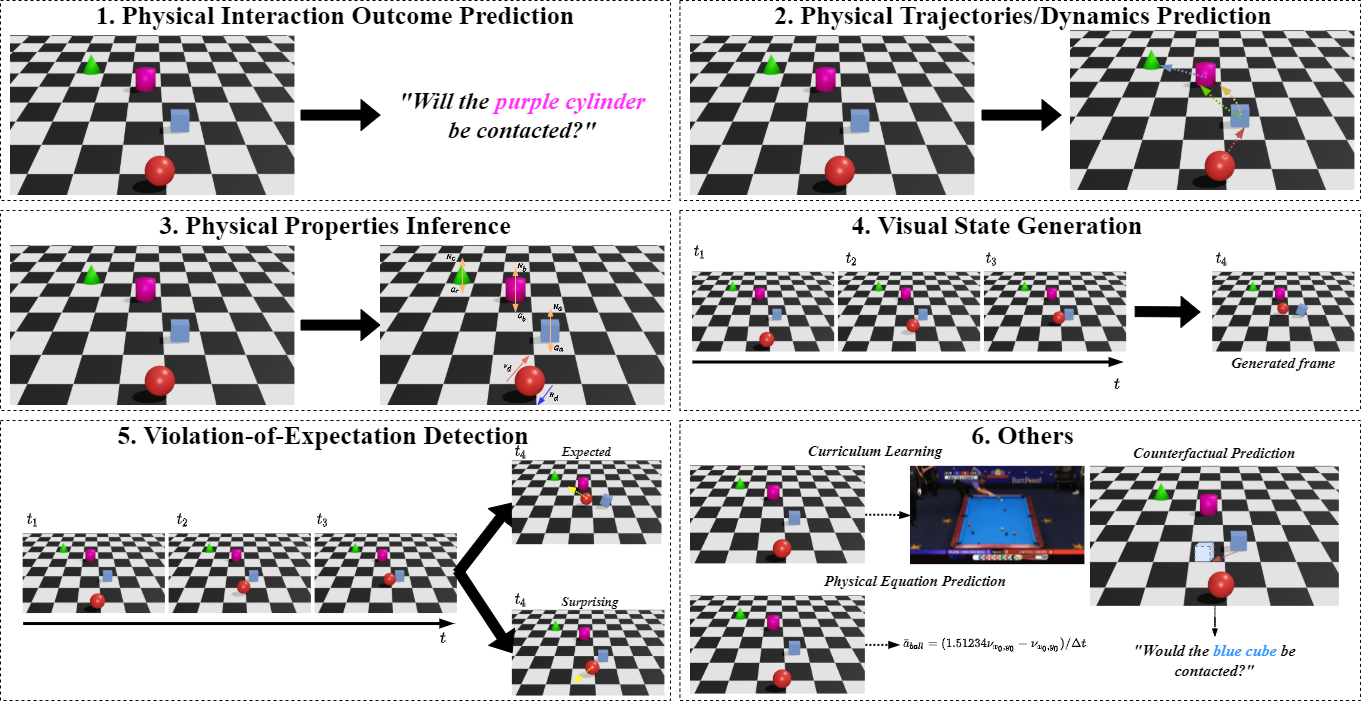
- [2022/07] PIP accepted to ECCV 2022. Intuitive Physics Survey accepted to IJCAI 2022 as Oral.
📑 Publications
MolmoAct2: Action Reasoning Models for Real-World Deployment
arXiv 2026
MolmoAct2: Action Reasoning Models for Real-World Deployment
arXiv 2026
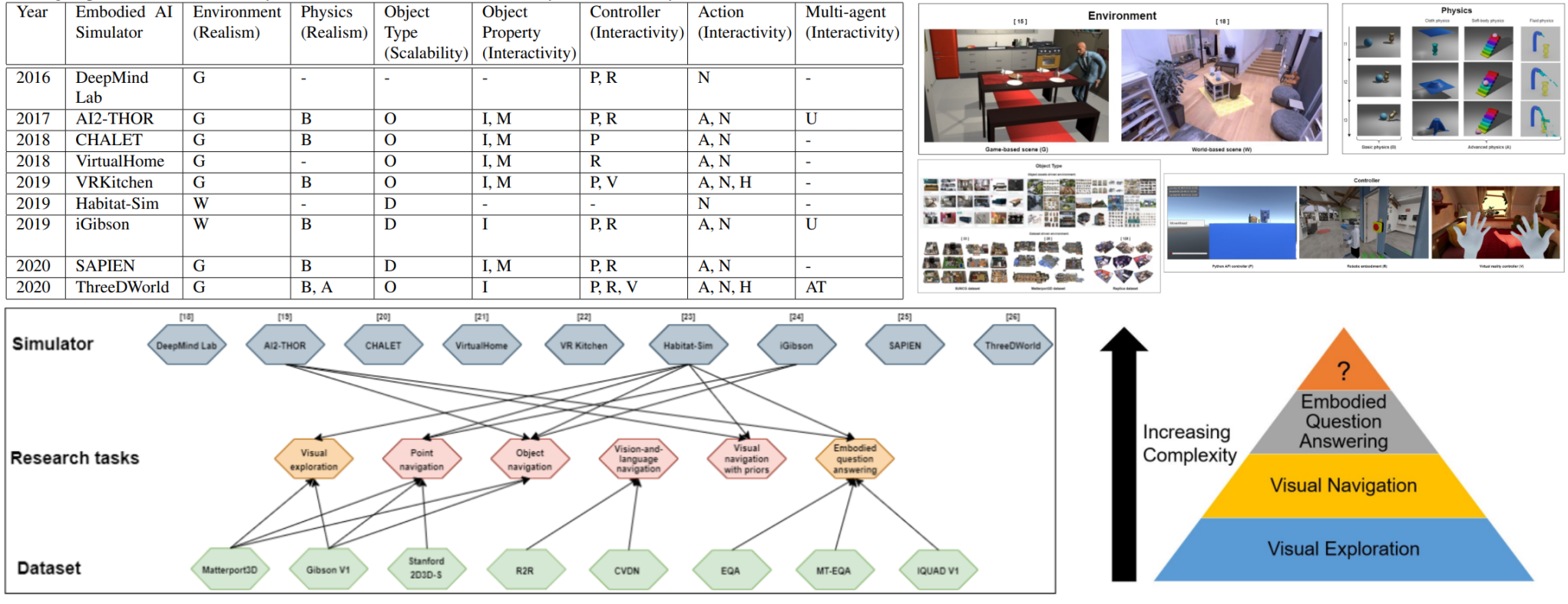
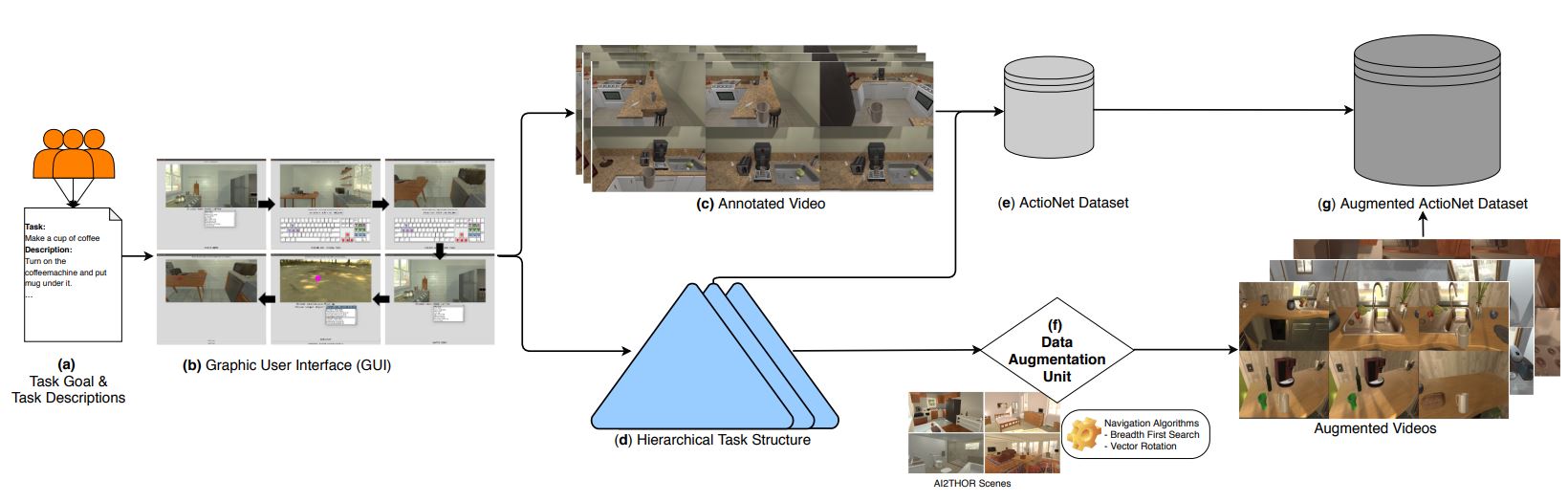
A Survey of Embodied AI: From Simulators to Research Tasks
IEEE Transactions on Emerging Topics in Computational Intelligence
💬 Invited Talks
- [2026] Talk at Cohere Labs Open Science Community on "MolmoAct2: Building Open Science Robotics Foundation Models for Real-World Deployment" (Host: Cole Harrison).
- [2026] Interview on RoboPapers (Ep#87) on "MolmoAct2: An Open Foundation for Robots That Work in the Real World".
- [2026] Interview on Talking Robotics on "MolmoAct2: Action Reasoning Models for Real-World Deployments".
- [2026] Talk at UWaterloo CS Seminar on "Building Robotics Foundation Models with Reasoning-in-the-Loop" (Host: Victor Zhong).
- [2026] Talk at UT Austin CS Seminar on "Building Robotics Foundation Models with Reasoning-in-the-Loop" (Host: Joydeep Biswas).
- [2026] Talk at University of Michigan CSE Seminar on "Building Robotics Foundation Models with Reasoning-in-the-Loop" (Host: Bernadette Bucher).
- [2026] Talk at MPI for Informatics on "Building Robotics Foundation Models with Reasoning-in-the-Loop" (Host: Christian Theobalt).
- [2026] Talk at UC Irvine CS Seminar on "Building Robotics Foundation Models with Reasoning-in-the-Loop" (Host: Sven Koenig).
- [2025] Keynote at CoRL 2025 Workshop on "Grounded Reasoning from Vision-Language Models".
- [2025] Talk at Mila Robot Learning Seminar on "Towards Robotics Foundation That Can Reason" (Host: REAL Lab).
- [2025] Talk at TTIC Young Researcher Seminar Series on "Towards Robotics Foundation That Can Reason" (Host: Matt Walter).
- [2025] Talk at Georgia Tech on "Towards Robotics Foundation That Can Reason" (Host: GT Institute for Robotics and Intelligent Machines).
- [2025] Talk at Johns Hopkins University on "Towards Robotics Foundation That Can Reason" (Host: Tianmin Shu & Peter Kazanzides).
- [2025] Talk at META FAIR Robotics Group on "Towards Robotics Foundation That Can Reason" (Host: Homanga Bharadhwaj).
- [2024] Talk at Stanford PAIR Group on "Towards Unified Multimodal LLM for Robotics" (Host: Wenlong Huang).
- [2024] Talk at CMU RCHI Group on "Grounded Embodied Intelligence" (Host: Zackory Erickson).
- [2024] Talk at Amazon Lab126 on "Democratizing Robot Learning for All" (Host: Yuyin Sun).
- [2024] Talk at The AI Talks on "Democratizing Robot Learning for All".
- [2024] Talk at UW Allen School Colloquium on "Democratizing Robot Learning for All".
- [2023] Talk at AAAI Summer Symposium on "AR2-D2: Training a Robot Without a Robot".
📖 Academic Services
Workshop Organizer
- 3D Vision Language Models (VLMs) for Robotics Manipulation @ CVPR 2025
- Generalization in Robotics Manipulation Workshop and Challenges @ CVPR 2025
- Mobile Manipulation: Emerging Opportunities & Contemporary Challenges @ RSS 2025
- SPACE in Vision, Language, and Embodied AI @ NeurIPS 2025
- Generalizable Priors for Robot Manipulation @ CoRL 2025
Academic Service
Conference/Journal
- CVPR, ECCV, ICCV, NeurIPS, ICLR, ICML, ICRA, IROS, CogSci
- RA-L, IEEE Transactions on Automation Science and Engineering, Pattern Recognition
Teaching
- NUS CS6283: Robot Learning in the Era of Foundation Models — Instructor
- UW CSE 571: Robotics — Co-instructor with Prof. Dieter Fox (Winter 2026)
- UW CSE 571: Robotics — Teaching Assistant (Spring 2025)
- UW CSE 599H: AI vs Intelligence Augmentation — Head Teaching Assistant (Winter 2023)
🎓 Education
University of Washington, 2021 - 2026
Doctor of Philosophy in Computer Science
Co-advised by Prof. Ranjay Krishna and Prof. Dieter Fox
Nanyang Technological University, 2016 - 2020
B.Eng. in Electrical and Electronic Engineering
- Highest Distinction
💼 Experience
National University of Singapore
Presidential Young Professor, 2026 -
- Directing the MAGIC Lab, School of Computing
Allen Institute for AI (AI2)
Graduate Student Researcher, 2023 - 2026
- Working with the PRIOR team and Robotics team
- Mentored by Prof. Ranjay Krishna and Prof. Dieter Fox
NVIDIA
Research Scientist Intern
- Research on robotic manipulation and vision-language models
🏅 Awards
- Best Paper Award at RemembeRL @ CoRL 2025 (with SAM2Act)
- Best Paper Award at Ubiquitous Robots 2023 (with Good Time to Ask)
- Spotlight at ICLR 2024 (with Selective Visual Representations)
- Oral at RSS 2024 (with THE COLOSSEUM and Octopi)
- Oral at IJCAI 2022 (with Intuitive Physics Survey)
- Featured in MIT Technology Review, GeekWire, VentureBeat, Business Wire